
La conquête des longitudes
En première approximation, la Terre tourne sur elle-même, en un peu moins de 24 h, autour d’un axe qui garde une direction fixe, l’axe N-S.
Les étoiles sont suffisamment lointaines pour apparaître fixes. Il est facile (en théorie) de mesurer l’angle entre la direction N-S et le zénith ce qui permet de déterminer la latitude d’un lieu.
Il n’y a pas d’autres directions privilégiées ce qui ne permet pas de déterminer une deuxième grandeur comme la longitude pour repérer un point à la surface de la Terre.
Le problème est que chacun voit midi à sa porte. Il faudrait trouver un phénomène qui permette de mesurer l’écart de temps entre les « midi » de deux endroits différents.
C’est essentiellement l’histoire de cette recherche que je me propose de vous narrer.
Des Grecs jusqu’à la fin du Moyen-âge
Pythéas (-330)
Effectue une expédition vers le nord à partir de Marseille ; découvre la banquise (le poumon marin), les baleines, l’Islande (?) ou les Orcades, peut-être le Soleil de minuit, la Baltique.
Mesure de très nombreuses latitudes avec un gnomon.
Ératosthène (-276 ; -194)
Effectue la première évaluation connue correcte de la dimension de la Terre supposée sphérique.

Au Solstice d’été le Soleil éclaire sensiblement le fond d’un puits à Syène (actuelle Assouan) tandis que la mesure de l’ombre d’un obélisque permet d’affirmer que le Soleil est à 7° 12’ (= 360°/50) de la verticale à Alexandrie.
La circonférence terrestre vaut donc 50 fois la distance entre les deux villes si elles sont sur le même méridien (ce n’est pas le cas, il y a environ 3° d’écart, guère mesurable à l’époque).
Une évaluation difficile de la distance à vol d’oiseau entre les deux villes en transformant en stades de 500 pieds les temps de parcours des caravanes ou des navires conduit à 5 040 stades, soit 252 000 pour la circonférence, soit 700 stades au degré. Des nombres bien trop ronds pour être tout à fait honnêtes !
- Problème : Combien vaut le pied ?
Selon le pied qui aurait été utilisé on trouve entre 37 800 et 47 900 km.
Hipparque (-194 ; -120)
Un des plus grands savants du monde grec antique :
- il découvrit la précession des équinoxes ;
- il inventa la division du cercle en 360° ;
- il suggéra une nouvelle méthode de détermination de la latitude (en faisant la moyenne de sa plus grande et plus basse hauteur d’une étoile circumpolaire) ;
- il évalua de façon précise la distance Terre-Lune.
L’observation prouve que, lors des éclipses de Soleil, le cône d’ombre de la Lune affleure la surface terrestre. Or la Lune a un diamètre apparent de ½ degré. Le cône d’ombre de la Terre a donc aussi un angle de ½ degré.

Hipparque évalue à 3 diamètres lunaires la largeur du cône d’ombre de la Terre au niveau de la Lune. Donc le diamètre de la Terre est 4 fois celui de la Lune. Il trouve alors que la distance Terre-Lune est de 30 diamètres terrestres.

À noter (voir ci-contre) que l’évaluation de la dimension du cône d’ombre de la la Terre au niveau de la Lune n’est pas chose évidente.
Hipparque donna un moyen de déterminer la longitude en utilisant les éclipses de Lune. C’est un phénomène qui a lieu au même instant pour tous ceux qui ont la Lune au dessus de l’horizon.

Malheureusement la détermination de l’heure est encore très approximative : type d’instruments différents (clepsydres à écoulement non linéaire, sablier...) et heures inégales dépendantes des saisons et de la latitude. Et la nuit c’est encore pire.
Même au XVe siècle on propose encore de mesurer l’heure de la nuit à l’aide d’une corde tenue à bout de bras en visant une étoile. La longueur de la corde entre le sol et la main donne une approximation de la hauteur de l’étoile donc de l’heure !
La méthode d’Hipparque sera utilisée par Kepler qui donnera enfin une dimension convenable à la Méditerranée.
Ptolémée
Réflexion théorique sur la cartographie qui va de pair avec la géographie.
Il établit une liste de lieux avec les longitudes et les latitudes. C’est lui qui invente ces mots construits sur longueur et largeur car le monde habité s’étend sur 180° de longitude et 80° de latitude (environ). De même il invente le mot de « climat » (sur inclinaison) et la notion de parallèle, calculant la durée des jours et des nuits selon la latitude. L’écart d’une vingtaine de degré en longitude provient du choix de Ptolémée de partir des Canaries pour n’avoir que les longitudes positives.
Aucune des éventuelles cartes qu’il aurait fait tracer ne nous sont parvenues. Lors de la redécouverte de ce savant à la fin du moyen âge à travers les écrits arabes, on redessine ses cartes.
Il propose deux types de projection cartographique.
- Dans la première, les méridiens sont des droites tracées en vraie grandeur (à l’échelle) et les parallèles sont des cercles concentriques.

Le parallèle de Rhodes (36°) est en vraie grandeur (sensiblement 4/5). Le tracé de l’hémisphère sud pose problème car les parallèles sont de plus en plus grands contrairement à la réalité. Il casse donc leur tracé sur l’équateur.
- Dans la deuxième, le méridien central est une droite en vraie grandeur. Les parallèles sont des cercles concentriques en vraie grandeur et les méridiens sont tracés point par point pour respecter l’échelle sur les parallèles.

La projection est équivalente (elle respecte le rapport des aires).
Pour évaluer les erreurs de mesure en longitude on superpose la carte de Ptolémée avec la carte actuelle en utilisant sa projection :

Une autre façon de faire est d’évaluer les écarts de longitudes entre différents lieux dans la mesure où on peut les identifier à des lieux actuels :
| distance de… | à | Ptolémée | réelle |
|---|---|---|---|
| Îles Fortunées (Canaries) | Cap sacré | 2,5° | 10° |
| Cap sacré (Cap St-Vincent) | Embouchure du Bétis | 2,5° | 2,5° |
| Embouchure du Bétis (Guadalquivir) | Gibraltar | 2,5° | 1,5° |
| Détroit de Gibraltar | Carallis | 25° | 15° |
| Carallis (Cagliari — Sardaigne) | Lilybée | 4,5° | 3° |
| Lilybée (Marsala — Sicile) | Pachynum | 3° | 3,5° |
| Pachynum (Cap Passaro) | Cap Tenare | 10° | 8° |
| Cap Tenare (Matapan) | Rhodes | 8,25° | 6° |
| Rhodes | Issos | 11,25° | 9° |
| Issos (Alexandrette) | Euphrate (où ?) | 2,5° | |
| total | 72° |
La civilisation arabe
Pour revenir à la mesure de la Terre, il nous faut citer les mesures de 1° de méridien commanditées vers 825 par le calife de Bagdad Al-Ma’mûn (786, 833). Une première expédition va dans les plaines de Shinar, le long des côtes sud de la mer rouge. Elle détermina deux points sur le même méridien séparés de 1° en mesurant la hauteur du pôle au moyen d’un astrolabe, puis elle mesura, en coudées hachémites, la distance entre ces deux points. En multipliant par 360, elle aboutit à une circonférence de 20 400 milles.
Mais il reste deux problèmes : d’une part de connaître le nombre de coudées dans un mille et d’autre part de connaître la valeur de la coudée hachémite dans le système international.
Diverses évaluations ont été faites pour la coudée qui oscille entre 493,2 mm à 501,2 mm, la valeur la plus probable étant 498,75 mm. Par ailleurs le mille contient-il 3000 ou 4000 coudées, plutôt cette dernière valeur. Les thuriféraires de la civilisation arabo-musulmane affirment que cela donne une circonférence de 39 986 km soit une erreur de 877 m sur le degré de méridien à la latitude d’environ 15°.
Mais une seule mesure ne suffit pas à déterminer la forme de la Terre, et pour s’assurer de sa sphéricité, le calife Al-Ma’mun enverra une autre expédition faire deux mesures du côté de Sinjâr à 120 km à l’ouest de Mossoul. Deux équipes, partant du même point, l’une vers le nord, l’autre vers le sud firent également une mesure d’un arc de 1° et la concordance de leur résultat permis d’affirmer la rotondité de la Terre.
Pour la petite histoire, retenons qu’il se trouva un docteur en théologie parmi les plus renommés, Takyuddin, qui menaça des pires châtiments divins un calife qui se permettait de troubler la dévotion des fidèles musulmans en diffusant des idées fausses et une philosophie athée, puisqu’il est bien écrit dans le Coran que la terre est plate et carrée (par exemple sourate 51 verset 48) ! L’avantage, en l’occurrence, de l’islam, c’est qu’Al-Ma’mun est aussi chef spirituel, ce qui lui permet de passer outre les foudres de Takyuddin.
Peu de progrès par rapport à Ptolémée. Ainsi Al-Istarkhi donne une représentation assez géométrique :

Cette magnifique carte au tracé très géométrique dû à la mode de l’époque donne, avec le sud en haut, les principaux lieux du monde connu. Encadrant la carte une calligraphie précise septentrion ( al-ShMAL), orient (al-ShRQ), sud (al-JNUN), occident (al-MGhRB).
Idrissi au XIIe siècle, à la cour du roi normand Roger II à Palerme, reprend les résultats de Ptolémée en le reprécisant d’un point de vue de sicilien. Ce ne sont que des cartes partielles qui ont été mises bout à bout par la Bibliothèque Nationale :

La méditerranée y est particulièrement bien décrite :

On notera que le nord est toujours en bas.
L’utilisation systématique des éclipses de Lune et l’amélioration de la mesure de l’heure permettent de mieux préciser les différences de longitude. C’est ainsi qu’après la reconquête de Tolède en 1085, (souvent prise comme origine des méridiens en raison de l’investissement de la ville dans la cartographie), on réduira à 9° environ la différence entre Marseille et Tolède au lieu des 14° envisagés alors.
L’Europe du Moyen-âge
Il faut citer la table de Peutinger copie vers le milieu du XIIIe siècle d’un original datant de 500 (?) copie lui-même d’une œuvre plus ancienne (?). Il reste 11 feuilles sur les 12 d’origine, feuilles qui mises bout à bout forme une carte très déformée en longueur de 682 × 34 cm.

la table de Peutinger
|

avec les noms actuels
|
On se rendra compte des déformations en plaçant quelques noms actuels à la place des noms latins. Les distances sont indiquées entre deux décrochements, qui marquent des localités de moindre importance, en miles romains ou dans des unités locales comme la lieue gauloise sur l’extrait présenté.
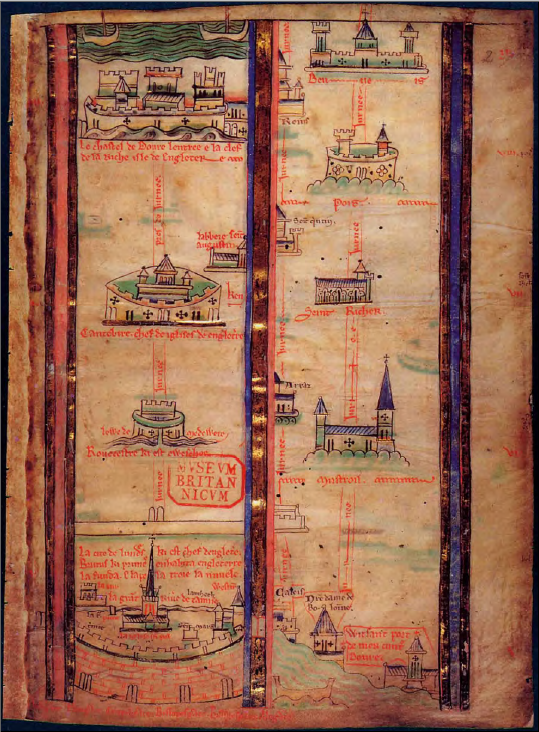
D’un autre côté, il y a des itinéraires de pèlerinage donnant les étapes à faire pour aller d’un lieu à l’autre. Ici on part de Londres et on franchit la Manche à Douvres pour arriver à Calais puis continuer sur Beauvais.
Par ailleurs il y a les cartes dites en « T.O. » comme celle de Turin du Xe siècle ou leurs avatars qui sont avant tout des représentations symboliques, montrent le monde sous l’influence divine.

Jérusalem est souvent au centre et quelques rares lieux sont indiqués. le monde connu est entouré d’un océan (le O) coupé par un T dont la barre verticale est la méditerranée, la barre horizontale droite est le Nil et la gauche la mer Noire prolongée par la Vistule (ou ... ?) jusqu’à la Baltique.
De Mercator jusqu’au XIXe siècle
Mercator (1512 ; 1594)
Première représentation conforme, c’est-à-dire qui respecte les angles, en 1569 sous la forme de 18 feuilles :

Il cherche à représenter par des droites les chemins à cap constant, ce qui nécessite l’utilisation d’une fonction mathématique connue depuis sous le nom de fonction de Mercator qui fait appel aux logarithmes (inventés 40 ans plus tard) et au calcul intégral (mis au point près d’un siècle plus tard). Mais cette fonction est construite par Mercator point par point en valeurs approchées ce qui entraîne quelques erreurs qui seront mises en évidence ultérieurement. Mais ce sont uniquement des erreurs en latitude. En longitude il n’y a que les erreurs de mesure sur le terrain, ce que montre une comparaison d’une carte actuelle avec celle de Mercator :


D’un point de vue mathématique (voir ci-contre), il s’agit d’une intégration approchée par la méthode des rectangles en utilisant un pas de 5°.
Imaginons que nous partions d’un point A de l’équateur et que nous suivions un cap à 45° du Nord, ce qui doit se traduire sur la carte par une droite inclinée à 45° sur l’équateur. Déplaçons-nous de 5° en longitude en suivant ce même cap pour atteindre un point B : nous décrivons la diagonale d’un carré dont le côté vaut 555,555 km, nous arrivons donc en un point B à cette même distance de l’équateur, c’est-à-dire à 5° de l’équateur (puisqu’un degré vaut 111,111 km).
Mais 5° en longitude à la latitude de 5° ne valent plus que 555,555 x cos(5°) = 553,441 km ce qui veut dire que si nous continuons à nous déplacer de 5° en longitude nous n’atteindrons qu’un point C, 553,441 km plus au nord, ce qui ne correspond qu’à 4,981° de plus en latitude. Le point C a donc pour coordonnées (10° ; 9,981°).
Mais à cette latitude de 9,981°, 5° en longitude ne valent que 555,555 x cos(9,981°) = 547,147 km et par conséquent si nous continuons toujours selon le cap de 45° nous atteindrons le point D situé à 15° de longitude mais seulement à 555,555 + 553,441 + 547,147 = 1656,143 km de l’équateur ce qui correspond à 14,905°.
Le raisonnement se poursuit aussi longtemps que l’on veut ce qui permet de calculer les latitudes des parallèles que représentent les lignes régulièrement espacées depuis l’équateur.
Il est évident qu’il ne s’agit pas de tracer sur une carte le parallèle 9,981° mais, par exemple, le parallèle 10°. Il y a alors deux façons de faire :
- soit on interpole linéairement entre 9,981 et 14,905. Comme il y a un écart de 0, 019 entre 10 et 9,981 et un écart de 4,924 entre 14,905 et 9,981 on placera 10° aux $\displaystyle\frac{0,019}{4,924}$ de l’intervalle, ce qui le place très légèrement au dessus de 9,981°.
- soit, au lieu de se déplacer de 5° en longitude à partir de B on se déplace d’exactement 555,555 km à la latitude de 5° ce qui correspond à $\displaystyle{ \frac{555,555}{111,111 \times \cos(5^{\circ})}=\frac{5}{ \cos(5^{\circ})}=5,019^{\circ}}$ en longitude
On retrouve le même 0,019 que précédemment. On atteint ainsi le point C’ de coordonnées (10,019° , 10°).
En généralisant cette deuxième façon de faire, on remarque que l’on placera le point D’ de latitude 15° à la longitude $\displaystyle{ 5+\frac{5}{\cos(5^{\circ})} + \frac{5}{ \cos(10^{\circ})}=15,096^{\circ}}$ et ainsi de suite.
Nous voyons donc que pour situer le parallèle 45°, par exemple, nous nous placerons à 45° de l’équateur sur le méridien $\displaystyle{ 5+\frac{5}{ \cos(5^{\circ})}+ \frac{5}{ \cos(10^{\circ})}+ … + \frac{5}{ \cos(40^{\circ})}=49,515^{\circ}}$.
À 60° de l’équateur, nous aurions trouvé 73, 082°.
Bien sûr, si au lieu de prendre des intervalles de 5° nous avions utilisé des intervalles de seulement 1° (ou même plus faible) l’approximation aurait été bien meilleure. Il aurait fallu calculer $\displaystyle{ 1+\frac{1}{ \cos(1^{\circ})}+\frac{1}{ \cos(2^{\circ})}+ … + \frac{1}{ \cos(44^{\circ})}}$ dans l’exemple précédent, ce qui nous aurait placés sur le méridien 50,294° pour le parallèle 45° et un calcul analogue aurait conduit à 74,961° pour le parallèle 60°. L’écart est d’autant plus grand que l’on s’éloigne de l’équateur.
Mais on n’utilise pas une projection de Mercator, au delà de 60° de latitude. De plus à l’époque où Mercator construisit sa projection, des erreurs de plusieurs degrés dans la mesure des longitudes sont choses courantes.
À la même époque, d’autre géographe imaginent d’autres méthodes de projection, comme celle d’Oronce Fine (1540) qui reprend une variante de la deuxième méthode de Ptolémée avec une carte en forme de cœur :

Galilée (1564 ; 1642) et les satellites de Jupiter
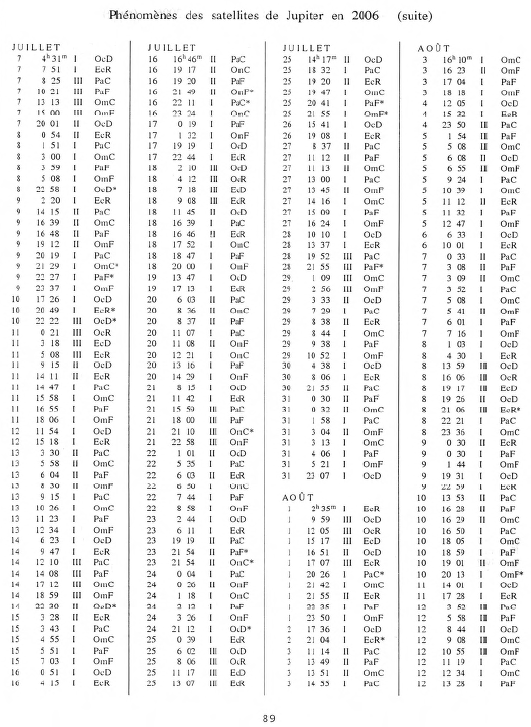
C’est le 7 janvier 1610 que Galilée découvre les satellites (galiléens) de Jupiter. Dès 1712 il a l’idée d’utiliser les passages devant ou derrière Jupiter pour obtenir une horloge régulière.
C’est l’idée des éclipses mais qui ont lieu bien plus souvent comme le montre ce graphique qui indique le ballet des satellites par rapport à Jupiter.

Aujourd’hui on peut distinguer des passages (début et fin) devant Jupiter, des occultations (disparition et réapparition) derrière Jupiter, des éclipses (disparition et réapparition) dans l’ombre de Jupiter et même l’ombre du satellite (commencement et fin) sur Jupiter.
Cependant ces phénomènes ne sont pas toujours visibles soit qu’ils aient lieu dans la journée, soit quand Jupiter est trop proche visuellement du Soleil, soit qu’il soit trop bas sur l’horizon... Sur le tableau ceux qui sont visible depuis Paris sont indiqués par un astérisque (*).
Galilée va casser les pieds des grands de ce monde pour imposer son idée, mais sans succès.
C’est que les tables qu’il met au point sont imprécises (on ignore en particulier la vitesse de la lumière qui se traduit par des écarts de ±8 min) et l’optique des lunettes donne des taches qui ne permettent pas de mesurer de façon précise les instants de contact.
De plus pointer les immenses lunettes de l’époque sur un bateau soumis au tangage et au roulis relève de la gageure. Galilée s’essayera vainement à l’invention du gyroscope mais il faudra attendre Huygens.
Ultérieurement, en 1671 cette méthode permettra à Richer de préciser la position de Cayenne (à moins de 3’ de sa valeur exacte) mais alors l’optique et les tables ont fait de notables progrès.
La Hire et Cassini vont utiliser cette méthode pour redresser le tracé des côtes de France entre 1676 et 1681 au grand dam de Louis XIV qui voit fondre ses terres :


Les Cassini et la triangulation
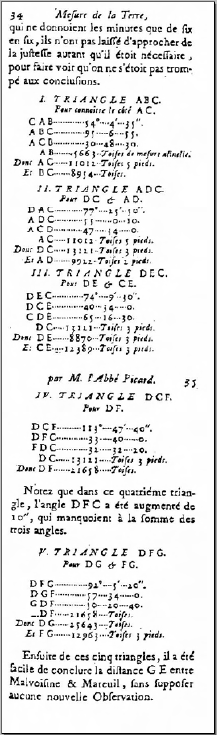
La triangulation est un principe assez simple : On mesure soigneusement la longueur d’une base horizontale, puis les angles de différents triangles. La trigonométrie plane permet de calculer les longueurs successives de tous les triangles donc de positionner tous les points.
Connu depuis longtemps, le principe est appliqué par Picard entre Malvoisine et Amiens. Il est facile de vérifier les calculs dont il donne les résultats dans son ouvrage : « L’aventure de la carte de France ».
Très bien sur terre ou à proximité des côtes mais impossible de faire le point par triangulation en pleine mer ! On peut éventuellement prendre un relai avec un bateau en pleine mer. L’idée aboutira en… 1963 avec le telluromètre (utilisation d’une onde radio) et la liaison France — Angleterre au niveau du Cotentin.
La méthode des signaux de feux
En 1738, entre Sète (la montagne) et Marseille (Ste-Victoire) règlent leur horloge localement et pointent l’heure précise qu’elles marquent au moment où apparaît la déflagration d’environ 2,5 kg de poudre mis à feu à mi-distance. Cela permet de préciser l’écart de 7’ 33,25" entre les deux stations, bien meilleure que la méthode des satellites de Jupiter.
Halley (1656 ; 1742) et la déclinaison magnétique
En 1700 Halley a l’idée de relier les points où la déclinaison magnétique est la même. En réitérant cette opération en 1744, il met en évidence la variation annuelle de la déclinaison qu’il suppose constante d’une année à l’autre. Ces lignes sont sensiblement nord-sud et par suite un marin qui connaît sa latitude et sa déclinaison peut déterminer sa longitude. C’est une méthode très grossière surtout loin des côtes.
La méthode des distances lunaires (et les éclipses)
Nous avons signalé l’utilisation des éclipses de Lune sur une idée d’Hipparque. Cela nécessite néanmoins une bonne connaissance de l’heure. Ainsi, Ptolémée signale une éclipse qui débute à 5 h de la nuit à Irbil (anciennement Arbela) en Irak et à 2 h à Carthage. Cela donne un écart de 3 h soit 45° au lieu des 33° 40’ soit un écart d’environ 330 km.
Le 21 février 1598 Képler utilisera cette méthode pour rattacher l’observatoire de Tycho Brahé au Danemark au sien à Graz.
Au XVIIe siècle une autre éclipse permettra de donner des dimensions plus exactes à la Méditerranée.
Il est donc nécessaire de mesurer assez précisément l’heure de début ou de fin de l’éclipse avec les difficultés que l’on sait (flou, chronométrage,..)
La Lune se déplace parmi les étoiles d’environ 1/2 d° par heure (son diamètre). En 1474, Regiomontanus (1436 ; 1476) propose d’utiliser la position de la Lune qui serait comme une aiguille indiquant l’heure parmi les étoiles. Il suffit de connaître la distance de la Lune (en d°) aux principales étoiles. Malheureusement le mouvement de la Lune est fort complexe et nécessite des calculs assez longs. À titre d’exemple aux XVIIIe siècle l’allemand Mayer puis le britannique Maskelyne publient des tables permettant une précision de 1,5° en longitude mais cela nécessite 4 ou 5 séries d’observations en moins de 10 min ce qui nécessite 4 observateurs et ensuite un calcul qui prend environ 4 h et que la plupart des capitaines ne sont pas capable d’effectuer.
Il faudra attendre le milieu du XIXe siècle pour que Delaunay après 20 ans de calcul publie enfin des formules précises.
Dans l’utilisation des distances lunaires, il y a une autre source d’erreur : la parallaxe (angle sous lequel on voit le rayon terrestre depuis la Lune). La position de la Lune (qui n’est pas très loin de la Terre) dépend de la latitude. La parallaxe est d’environ 57’ mais varie de ±4’ en raison de la distance variable. Or 1° = 111 km.
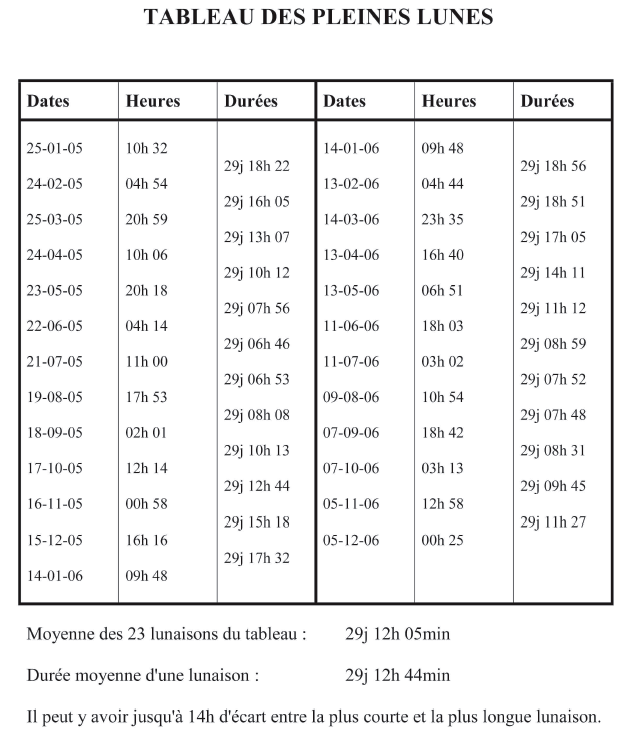
On peut se rendre compte des « inégalités » du mouvement de la Lune (c’est ainsi qu’on nomme les écarts à une marche régulière) en étudiant les durées des lunaisons. C’est un travail qui peut être mené en collège, dès la sixième où chaque élève calcule une lunaison.
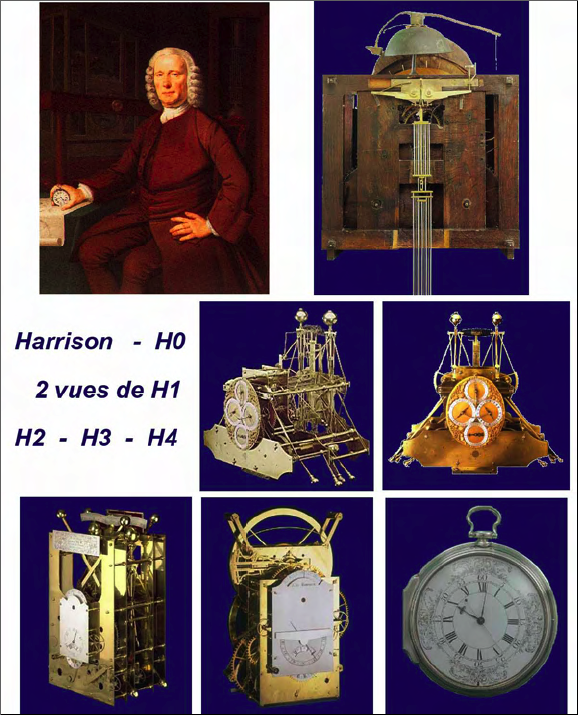
L’invention du chronomètre de marine par Harrison (1693 ; 1776)
Charpentier d’un petit village : Barrow-on-Humber à 250 km au nord de Londres, John Harrison s’occupe d’un peu de tout et répare les montres de ses concitoyens ce qui l’amène à se passionner pour l’horlogerie.
1714 apprend que le Parlement de Londres offre un prix de 20 000 £ pour la résolution du problème des longitudes.
Il se met au travail et construit une horloge en bois H0 mais avec balancier (voir quelques images des différentes horloges de marine). Ce n’est donc pas un chrono, mais il invente des solutions pour la régularité du mouvement.
Il se rend à Londres et contacte Halley qui admire son travail mais ne sait pas l’évaluer et le dirige vers George Graham chef de la corporation des maîtres horlogers. Harrison hésite et se rend chez lui. Graham lui avance des capitaux pour qu’il poursuive son œuvre.
Il passe 6 ans à construire H1 et l’achève en 1735. Ce chronomètre assez hétéroclite (33 kg, 90 cm de côté), il y a toujours du bois, est essayé en mer en 1736. Essai concluant qui lui permet d’obtenir une subvention du Bureau des longitudes.
1740, construction de H2. 1757, construction de H3. Peu de progrès, mais expérimente de nouvelles solutions pour résoudre certains problèmes.
1759, enfin H4 qui est un véritable chrono de marine. 13 cm de diamètre. Testé entre 1761 et 1762 entre Londres et la Jamaïque. Excellent résultat.
Mais les astronomes sont mauvais perdants. Un deuxième test est exigé en 1764 entre Portsmouth et la Barbade. 39s d’écart soit moins de 10’ d’angle (le règlement exigeait moins de 30’). Le Jury demande tous les secrets et les français chercheront à profiter de la mauvaise foi du Jury en cherchant à récupérer le travail d’Harrison moyennant compensation financière. Mais eux aussi se montreront trop mesquins et la tractation n’aboutit pas.
Il faut l’intervention personnelle du Roi George III pour qu’il obtienne enfin justice mais le jury retient les 1250 £ d’avance !
Harrison aura montré la voie. En France Berthoud trouve d’autres solutions et ce sont celles-là qui seront utilisées :

Mesure d’angles et de longueurs

Le cercle répétiteur est d’abord une invention théorique de l’astronome allemand Tobias Mayer (1723 ; 1762) et la réalisation pratique par Borda en 1787.
Il s’agit de mesurer non pas une fois l’angle, mais une vingtaine de fois par sommation grâce à deux plateaux tournant et deux lunettes. On bloque alternativement chaque disque et on fait tourner l’autre.
Borda invente aussi la règle bimétallique : Pt + Cu de deux toises solidarisé à l’une des extrémités. La mesure au microscope de la différence de longueur permet de connaître la température donc la longueur exacte de la verge (coefficient de dilatation : Cu = 16,7 10-6 ; Pt = 8,9 10-6). Les règles sont mises bout à bout sans contact. Le travail fastidieux : il faut 7 semaines pour mesurer une base d’une douzaine de km.
Fil invar, (acier à 36 % de Ni), invention de Benoît et Guillaume au début du XXe siècle. Les perches sont remplacées par des fils invar de 24m de long de faible diamètre (1,65 mm) suspendu sur des chevalets sous tension de 10 kg. Moyennant des corrections, la corde reprend toujours la même longueur entre deux mesures.
Cette méthode permet de diviser par 4 le temps et le nombre de personnes nécessaires à la mesure d’une base.
L’avènement des ondes radioélectriques
Permet enfin de relier les continents entre eux. Mais il faut connaître la vitesse de ces ondes dans l’atmosphère.
Signaux radioélectriques
Dès 1905 les USA émettent des signaux radioélectriques à destination des navires à proximité des côtes. Portée 250 km, précision 1".
En 1910 organisation d’un service de transmission de signaux horaires depuis la Tour Eiffel. Une première application est la synchronisation des horloges de Paris et Brest., puis Paris et Alger, puis Paris et Bizerte et enfin entre Paris et Washington en 1913—1914.
En 1913 mise en place d’une commission internationale de l’heure, unification des heures sur toute la planète.
En 1921 début de l’installation d’un réseau international de points dont les positions géographiques sont déterminées astronomiquement et qui émettent régionalement des signaux horaires. Fin des travaux 1926.
On se rend compte que la vitesse des ondes électromagnétiques est variable selon la longueur d’onde. Les ondes longues qui vont loin ont une vitesse de 247 000 km/s.
Le télémètre
C’est un instrument pratique qui repose sur la vitesse du son (environ 340 m/s). Or celle-ci est très variable selon la température et la pression (et aussi la quantité d’humidité), il faut donc l’étalonner avant chaque série de mesures. Instrument utile sur de petites distances.
Le telluromètre
Même principe mais basée sur l’émission d’une onde radioélectrique ce qui permet une portée d’environ 50 km. Mais nécessite une précision 1 million de fois meilleure sur la mesure des temps.
En 1963 utilisation d’un telluromètre pour mesurer la distance France — Angleterre à travers la Manche au niveau du Cotentin (soit 110 km) en visant un navire naviguant en ligne droite à mi distance. Cette mesure fut complétée par une triangulation optique classique à l’aide de pylônes de 30 m.
Le GPS
Il s’agit de mesure de distance par mesure de temps de parcours d’une onde dont on espère connaître la vitesse.

Deux causes principales influencent les erreurs possibles sur la position finale calculée par GPS. D’une part les problèmes de positionnement relatif des satellites, de leur vitesse et de leur trajectoire, d’autre part les problèmes dus au signal transmis.
- Le système GPS est initialement un système destiné à l’armée américaine et l’on sait les militaires très friands de secret. C’est pourquoi la trajectoire des satellites ne fut donnée qu’à 200 mètres près. Mais un secret ne peut être gardé trop longtemps et certains finirent par être capable de recalculer la trajectoire exacte des dits satellites, au grand dam de l’armée américaine qui consentit enfin à fournir les données exactes au mois de mai 2000 ! Ceci dit, position exacte veut dire à 20 cm près car les techniques actuelles ne permettent pas mieux.
- Il n’est pas sûr que l’onde émise atteigne directement le récepteur. Il peut y avoir des réflexions sur le sol (montagne, falaise, immeubles,...) ce qui fausse la distance mesurée en induisant des trajets multiples.
- La synchronisation des horloges satellitaires et celle du récepteur est rarement assurée. Le temps de parcours du signal émis est de l’ordre de 7 centièmes de seconde et un écart d’un millionième de seconde correspond à 300 mètres. Par suite la mesure de temps doit être faite à quelques nanosecondes près. C’est une précision qui ne pose pas de problème pour une horloge atomique et c’est de ce type d’horloge que sont équipés les satellites. Mais il est hors de question que le récepteur en contienne une pour des raisons de prix et d’encombrement.
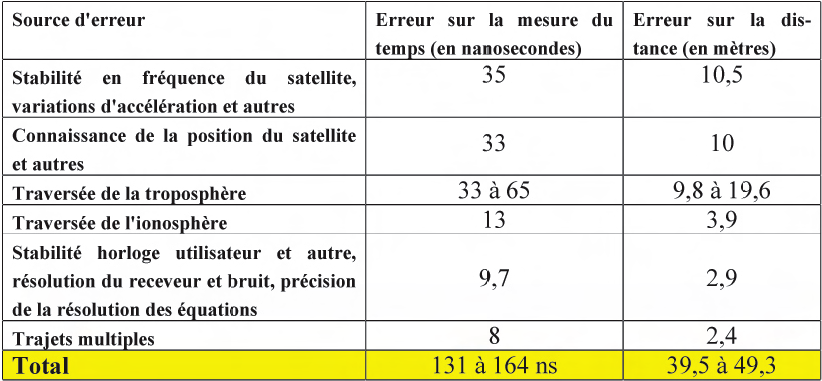
- La vitesse de l’onde n’est pas celle qu’elle aurait dans le vide puisqu’elle traverse d’abord l’ionosphère (entre 70 et 2 000 km d’altitude) qui comme son nom l’indique est fortement ionisée (c’est un "nuage" d’ions et d’électrons) ce qui perturbe l’onde électromagnétique et se traduit par un retard. L’onde traverse ensuite la troposphère (de 0 à 10 km d’altitude) qui contient beaucoup de vapeur d’eau ce qui implique également un retard pour le parcours de l’onde. S’il existe quelques techniques assez simples permettant de connaître le retard dû à la traversée de l’ionosphère, il n’en est pas de même de celui dû à la traversée de la troposphère qui dépend beaucoup des conditions atmosphériques.
- La position des satellites au moment des mesures influe également sur la précision. En effet la mesure de la distance à un satellite étant entachée d’une erreur on n’obtient pas une sphère mais une couronne sphérique ayant une certaine épaisseur. L’intersection de deux telles couronnes sphériques donne une zone d’autant plus grande que les sphères sont plus près de la tangence, comme le montre le dessin ci-après.
Dans la pratique l’utilisation du GPS donne d’excellents résultats en milieu ouvert, ce qui est le cas en mer (position des navires) ou dans les airs (position des avions). C’est un peu moins bon au sol surtout dans les zones accidentées ou dans les milieux semi-ouvert comme les banlieues des zones urbaines. Enfin c’est assez mauvais en centre ville ou dans les vielles villes où la présence d’immeubles multiplie les échos et les trajets multiples. Ceci explique pourquoi le guidage des voitures par satellites est assez facile sur autoroute en rase campagne, beaucoup plus difficile en centre ville. Dans ce dernier cas, il faut combiner le guidage par une connaissance du plan de la ville ou par une autre méthode.
La correction des erreurs
Nous allons reprendre dans l’ordre les différentes causes du manque de précision et voire comment ont peut y remédier.
- La position et la vitesse des satellites sont contrôlées et corrigés en permanence par le Département de la Défense Américaine (DoD). En effet, malgré l’altitude élevée (20 000 km) à laquelle orbitent les satellites, ceux-ci sont soumis à la pression du vent solaire, aux mouvements apparents de la Lune et du Soleil, au freinage du aux traces d’atmosphère,... Des moteurs internes permettent de corriger en permanence les dérives éventuelles de la trajectoire des satellites mais cela peut ne pas suffire dans certains cas extrêmes ; on transmet alors au satellite l’information sur sa nouvelle trajectoire (en position et en vitesse), information qui est retransmis vers les récepteurs GPS par un canal spécial (1227,60 Mhz).
Tous les satellites émettent sur la même fréquence, 1575,42 Mhz, fréquence modulée par un signal codé sur un bit de façon pseudo aléatoire. Cela signifie que le code ne prend que les valeurs 0 ou 1 selon une règle mathématique simple qui imite le hasard. (Voir la figure 19 page 22 où les lignes crénelées indiquent le niveau 0 ou 1 du signal). Chaque satellite dispose d’un code différend ce qui permet de le reconnaître. Le choix de cette fréquence assure une précision de 20 cm. Le choix du codage permet une amplification aisée, ce qui évite de mettre une parabole sur le récepteur GPS, et surtout permet d’éviter de confondre le signal avec autre chose. Accessoirement, un tel signal est également difficile à parasiter ce qui fait bien l’affaire des militaires toujours prompts à voir l’ennemi s’infiltrer partout.
- Le problème des trajets multiples de l’onde est un problème qui relève du hasard et qu’il est quasi impossible de résoudre. On s’en rend compte sur la figure 22 ci-après.
- L’écart de synchronisation entre le satellite et le récepteur peut facilement être corrigé grâce à la mesure de la distance à un quatrième satellite. En effet cet écart est le même pour toutes les mesures qui sont pratiquement faites simultanément. C’est un petit programme d’algèbre élémentaire qui effectue ce travail dans le récepteur du GPS.
- La vitesse du signal n’est pas exactement celle de sa vitesse dans le vide. Le problème est de mesuré cette vitesse moyenne. Cette vitesse moyenne peut être facilement calculée si on connaît les coordonnées exactes du lieu où l’on se trouve ; cela revient à utiliser le principe du GPS à l’envers : au lieu de calculer la distance à partir d’une vitesse supposée et du temps mis par le signal, on calcule la vitesse à partir du temps mis et de la distance connue.
Connaître la position exacte d’un lieu fixe au moyen de mesures astronomiques est parfaitement possible pour un laboratoire convenablement équipé. Maintenant, si ce laboratoire n’est pas trop loin du lieu du GPS (200 à 250 km au maximum), les vitesses du signal émis par le satellite vers ce laboratoire ou vers le GPS seront pratiquement les mêmes car les conditions rencontrées et les durées de trajet seront quasiment identiques. Il suffit alors que le laboratoire transmette au récepteur l’indication de la vitesse du signal pour que celui-ci en tienne compte et puisse éliminer cette source d’erreur. Remarquons qu’une légère adaptation de cette méthode a permis de corriger les erreurs volontaires sur la position des satellites que donnaient initialement le Département de la Défense Américaine.
Sources
On trouvera des compléments et d’autres idées de travail dans mon ouvrage :
- L’aventure cartographique, publié chez Belin - Pour la Science, 2004.
Pour le travail de Ptolémée on pourra consulter :
- Claude Ptolémée, astronome, astrologue, géographe, par Germaine Aujac, éditions du CTHS, 1993.
Pour la triangulation des Cassini :
- La méridienne de l’observatoire de Paris, par Cassini, Guérin, 1744.
Le site de la BNF fournit également de nombreux documents :
- Sur la géographie d’Idrisi : site de la BNF
- Sur la triangulation : exposition BNF
Si un utilisateur souhaite des compléments, il peut joindre l’auteur : Jean Lefort.

L’APMEP


Publications
![]()

Ressources
![]()




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}